
لینک دانلود و خرید پایین توضیحات
دسته بندی : پاورپوینت
نوع فایل : .ppt ( قابل ويرايش و آماده پرينت )
تعداد صفحه : 116 صفحه
قسمتی از متن .ppt :
اجزای روبات هوشمند

دریافت دانش از محیط
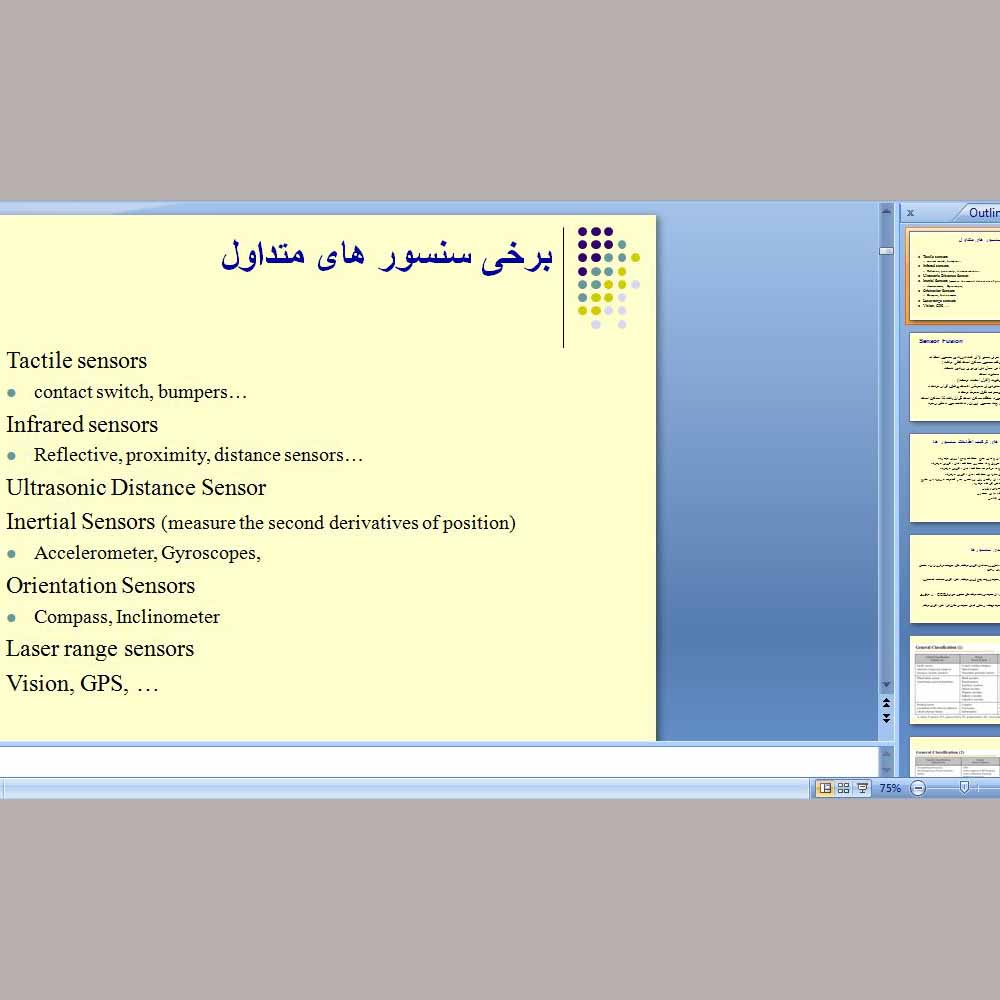
برخی سنسور های متداول

مبلغ قابل پرداخت 23,800 تومان
برچسب های مهم
 پاورپوینت آشنایی با انجمن حجتیه
پاورپوینت آشنایی با انجمن حجتیه پاورپوینت ایمنی مواد شیمیایی خواص فیزیکی و شیمیایی موادPhysical and Chemical Properties
پاورپوینت ایمنی مواد شیمیایی خواص فیزیکی و شیمیایی موادPhysical and Chemical Properties پاورپوینت استخراج روغن سبوس برنج با روش استخراج با سيّال تحت فشار ( PFE ) و بهينهكردن شرايط استخراج به وسيله طراحی فاكتوريال پاورپوینت اجزای روبات هوشمند
پاورپوینت استخراج روغن سبوس برنج با روش استخراج با سيّال تحت فشار ( PFE ) و بهينهكردن شرايط استخراج به وسيله طراحی فاكتوريال پاورپوینت اجزای روبات هوشمند پاورپوینت اخلاق اداری
پاورپوینت اخلاق اداری پاورپوینت Optometry یا آپتومری
پاورپوینت Optometry یا آپتومری پاورپوینت ارائه مؤثر با پاورپوینت
پاورپوینت ارائه مؤثر با پاورپوینت پاورپوینت آزمونهای غیر مخرب
پاورپوینت آزمونهای غیر مخرب پاوررپوینت امام خمینی و حوزه علمیه
پاوررپوینت امام خمینی و حوزه علمیه پاورپوینت اصول پیشگیری و تشخیص زودرس سرطان پاورپوینت آشنایی با انجمن حجتیه پاوررپوینت امام خمینی و حوزه علمیه پاورپوینت ایمنی مواد شیمیایی خواص فیزیکی و شیمیایی موادPhysical and Chemical Properties پاورپوینت استخراج روغن سبوس برنج با روش استخراج با سيّال تحت فشار ( PFE ) و بهينهكردن شرايط استخراج به وسيله طراحی فاكتوريال پاورپوینت اخلاق اداری
پاورپوینت اصول پیشگیری و تشخیص زودرس سرطان پاورپوینت آشنایی با انجمن حجتیه پاوررپوینت امام خمینی و حوزه علمیه پاورپوینت ایمنی مواد شیمیایی خواص فیزیکی و شیمیایی موادPhysical and Chemical Properties پاورپوینت استخراج روغن سبوس برنج با روش استخراج با سيّال تحت فشار ( PFE ) و بهينهكردن شرايط استخراج به وسيله طراحی فاكتوريال پاورپوینت اخلاق اداری پاورپوینت اکوسیستم های بیابانی پاورپوینت اجزای روبات هوشمند پاورپوینت اصول پیشگیری و تشخیص زودرس سرطان پاورپوینت آزمونهای غیر مخرب پاورپوینت ارائه مؤثر با پاورپوینت پاورپوینت Optometry یا آپتومری
پاورپوینت اکوسیستم های بیابانی پاورپوینت اجزای روبات هوشمند پاورپوینت اصول پیشگیری و تشخیص زودرس سرطان پاورپوینت آزمونهای غیر مخرب پاورپوینت ارائه مؤثر با پاورپوینت پاورپوینت Optometry یا آپتومری





